掲載日:2023.11.30
MATLAB/Simulinkで作成した制御モデルをリアルタイム実行できるエントリーモデル
MATLABベースのシミュレータとしては圧倒的な低価格を実現!
ディエスピーテクノロジ(株) DT-0009 MATLAB対応リアルタイムシミュレータ
MATLAB対応シミュレータ DT-0009は、MATLAB/Simulinkで作成した制御モデルをリアルタイム実行できるリアルタイムシミュレータです。MATLABベースのリアルタイムシミュレータとしては高性能、低価格を実現しました。


DT-0009本体(イメージ) Intel社製 Cyclone V SoC(ARM + FPGA)を搭載
FPGAを使用せずに20μsのシミュレーション周期を実現
- A/D:100ksps 12bit 4ch (0-4.096[V])
- D/A:(現在開発中)
- D/IO; 入力:16bit、出力:16bit
- PWM;12ch(3相上下アーム×2)、最大キャリア周波数1MHz
- カウンタ:LVTTL 6ch、32bit アップ/ダウン、カウンタ応答周波数 10MHz
- Ethernet;1Gbps 1ch
- ソフトウェア実装方法;MathWorks Simulink Coder™
- 最小ステップ刻み;20μs
- UART;1ch(USBコネクタ、ホストPCとの通信用)
DT-0009 PWM生成器仕様
- 計12CHのPWMを独立して制御可能
| 項目 | 仕 様 |
| キャリア波 | 三角波、鋸波 |
| 指令値分解能 | 最大100MHz/キャリア周波数 |
| デッドタイム | 0~1Sec、分解能:10nSec |
| キャリア周波数 | 1Hz~1MHz、設定分解能:1Hz |
| シミュレーション中に周波数を変更可能 | |
| 各PWM出力毎に設定可能 | |
| PWM制御信号数 | 3相×2回路、または、単相×6回路 |
| ゲート出力制御 | 独立してon/offの切り替えが可能 |
| イベントパルス | 1出力、キャリア波形の任意の位置 |
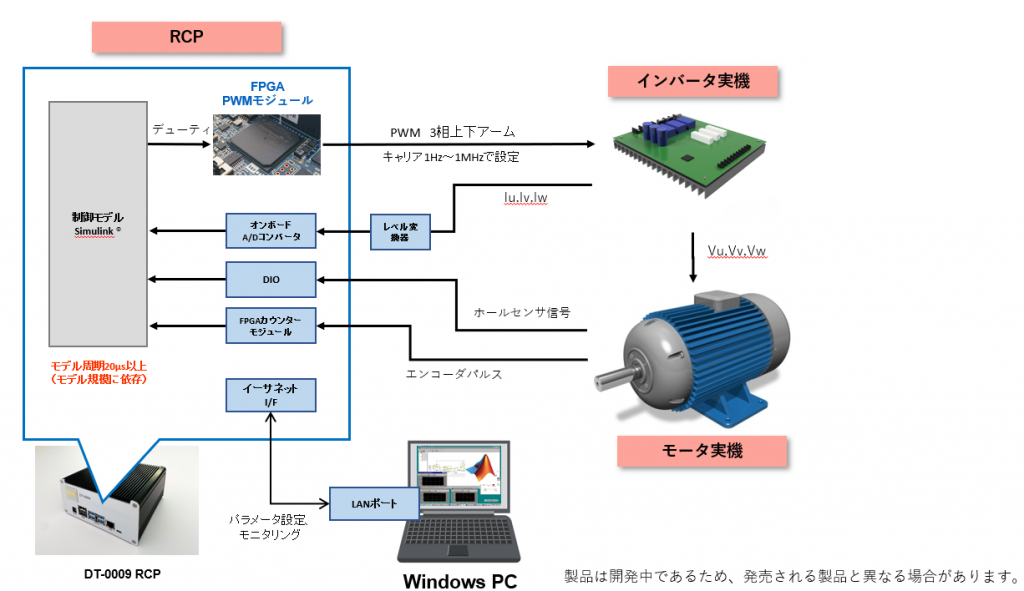
製品は開発中であるため、発売される製品と異なる場合があります。
DT-0009 RCP モータ制御システム構成図
- DT-0009をモータ制御用RCPとして使用した場合のシステム構成
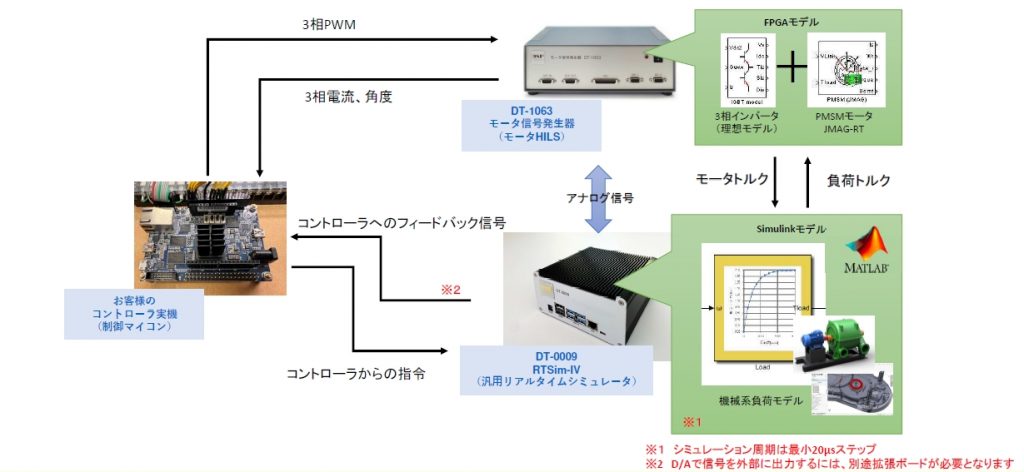
DT-0009 HILSシステム構成図
- 既存のDT-1063モータ信号発生器のモータ負荷モデルとして機械系モデル等を実装
- MATLAB、Simulinkで負荷モデルを記述することが可能
DT-0009 MATLAB対応リアルタイムシミュレータの詳細はこちらのページをご覧ください。